Abstract
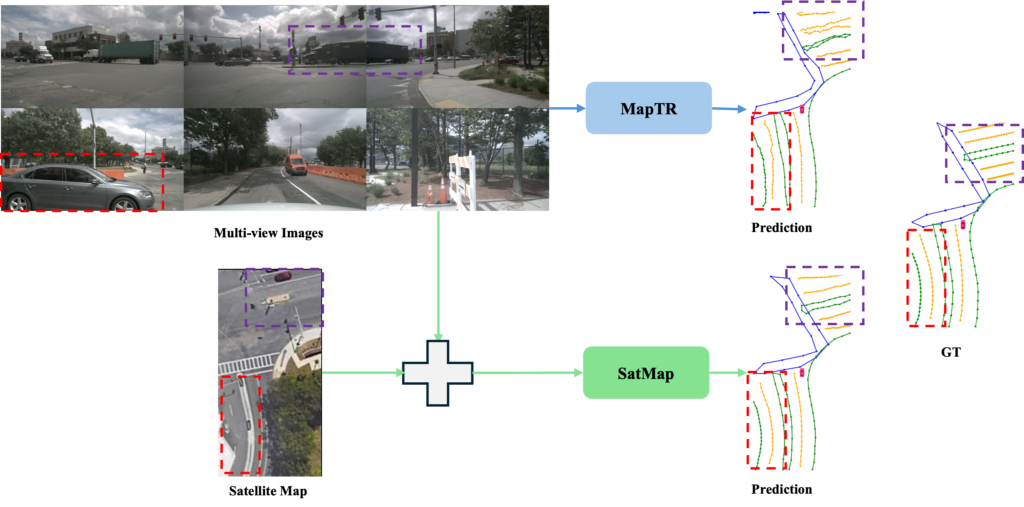
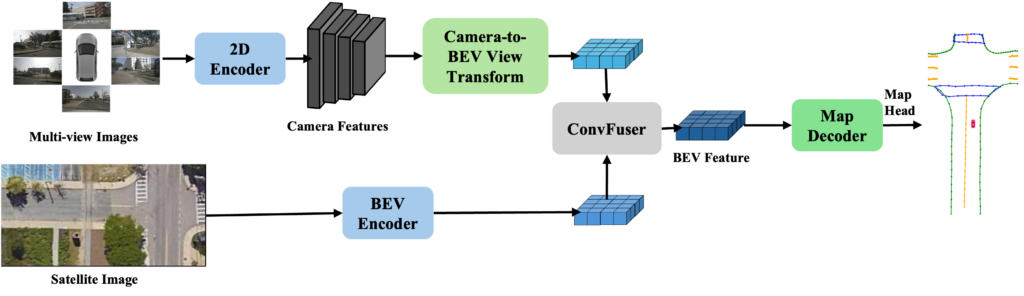
Online high-definition (HD) map construction is an essential part of safe and robust end-to-end autonomous driving (AD) pipeline. Onboard camera-based approaches suffer from limited depth perception and degraded accuracy due to occlusion. In this work, we propose SatMap, an online vectorized HD map estimation method, which integrates satellite map with multi-view camera observations and directly predicts vectorized HD map for downstream prediction and planning modules. Our method leverages lane-level semantics and texture from satellite imagery captured from Bird’s Eye View (BEV) perspective as a global prior, effectively mitigating depth ambiguity and occlusion. In our experiments on nuScenes dataset, SatMap achieves 34.8% mAP performance improvement over Camera-only baseline and 8.5% mAP improvement over Camera-LiDAR fusion baseline. Moreover, we evaluate our model in long range and adverse weather conditions to demonstrate the advantages of using satellite prior map. Source code will be available here.
Architecture
Result
Citation
@conference{
title = {SatMap: Revisiting Satellite Maps as Prior for Online HD Map Construction},
author = {Mazumder, Kanak and Flohr, Fabian B.},
booktitle ={ArXiv},
month = {January},
year = {2026},
}
Acknowledgement
This work is a result of the joint research project STADT:up (19A22006N). The project is supported by the German Federal Ministry for Economic Affairs and Climate Action (BMWK), based on a decision of the German Bundestag. The author is solely responsible for the content of this publication.

