Bachelor Thesis
Communication Framework for Autonomous Vehicles
Implement a communication framework for a real robot using ROS2.

Bachelor Thesis
Explainability Score for Autonomous Driving
Design a Score to evaluate Explainability in End-to-End Autonomous Driving methods.

Bachelor Thesis
Large Language Models for Robot Control
We have a variety of topics available. Contact us.
Bachelor Thesis
Perception of Human Pose with LiDAR Sensors
We have a variety of topics available. Contact us.
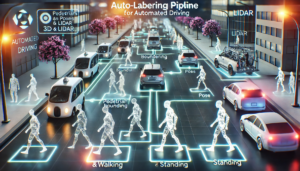
Master Thesis
Auto Labelling Pipeline
Design and create a pipeline for annotating images automatically with state-of-the-art Neural Architectures.
Master Thesis
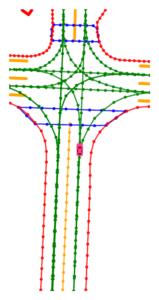
Fusion of Onboard Sensor based Map with Navigation Map
Develop an online map leveraging existing navigation maps and onboard sensors for autonomous driving.
Master Thesis
Simultaneous Localization and Mapping (SLAM) with an Autonomous Robot
We have a variety of topics available. Contact us.
Master Thesis
Map Generation for Simulation Environments
We have a variety of topics available. Contact us.
Research Master / Master Thesis
Autonomous Vehicle Perception
We have a variety of topics available. Contact us.
Research Master / Master Thesis
End-to-End Trajectory Planning with Modular Algorithms
We have a variety of topics available. Contact us.