Features
- Generalised scenario generation from DeepScenario drone data
- Map encoded information
- Comparable/Combinable with existing prediction and planning algorithms
- Comparable with other SOTA algorithms
How to
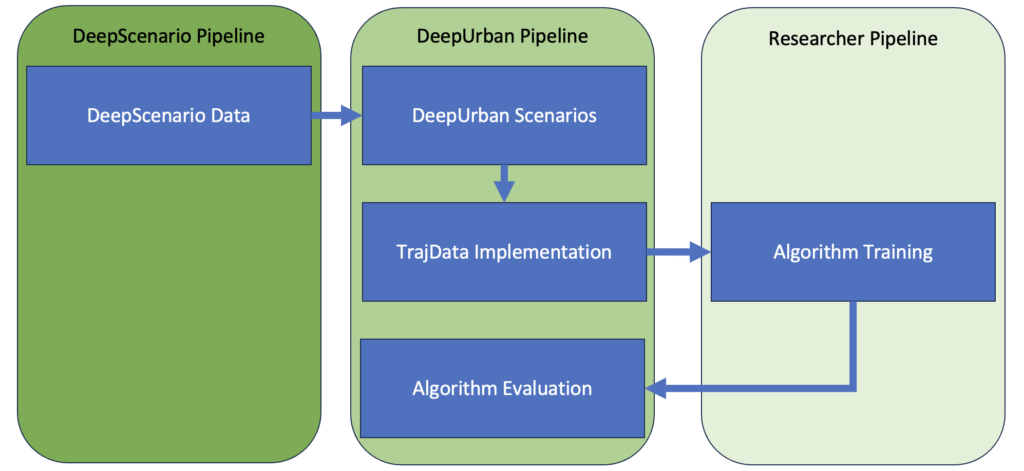
Scenario Generator
If Preprocessed Data is available for the version + location you can directly go to TrajData Implementation
- Download the DeepUrban ScenarioPreprocessor
- Construct the file system as suggested in the repository
- Download the scenario split of the location
- Splits should be placed int DeepUrban/split to be used for ScenarioCreator and TrajData
- Choose one of the supported locations datasets
- This step will redirect you to corresponding Location data from DeepScenario
- Sign Up or Sign In on the DeepScenario Website
- Currently supported Versions: Data V1, V2 and Interface V0.8, V0.9)
- Set source and output folder in DeepUrban/deepurban_scenariocreator/config/default.yaml
- DeepUrban/deepurban_scenariocreator/src/scenario_preprocessor.py to be used to build Scenarios
- Scenarios will be saved to DeepUrban/deepurban_scenarios/<location>
TrajData Implementation
- Download of corresponding lanelet2 map of the location
- Maps should be placed in DeepUrban/maps to be loaded into TrajData
- Download the modified TrajData Dataloader
- An example for the usage of DeepUrban Scenarios has been added deepurban_trajdata/examples/deepurban_example.py
- Source directory is the DeepUrban/deepurban_scenarios folder as mentioned in Scenario Generator
- Further details can be found in our extension of the trajdata dataloader DATSETS.md.
Supported Locations
Version – Data V1 – split
Version – Data V1 – Preprocessed Data
coming soon
Version – Data V2 – split
Further Locations Coming Soon
Version – Data V2 – DeepScenario Raw Data
MunichTal
StuttgartUniversitaetsstrasse
SanFrancisco
SindelfingenBreuningerland
Updates
2024-09-24
Possible version miss allignments will be tackled soon
Citation
If you use part of this pipeline, please cite it as follows:
@Inproceedings{selzer2024deepurban,
author = {Selzer, Constantin and Flohr, Fabian},
title = {{DeepUrban}: Interaction-aware Trajectory Prediction and Planning for Automated Driving by Aerial Imagery },
booktitle = {{IEEE International Conference on Intelligent Transportation Systems (ITSC)}},
month = sept,
year = {2024},
address = {Edmonton, Canada},
}Commercial Use
The DeepUrban dataset is free for non-commercial use only.