
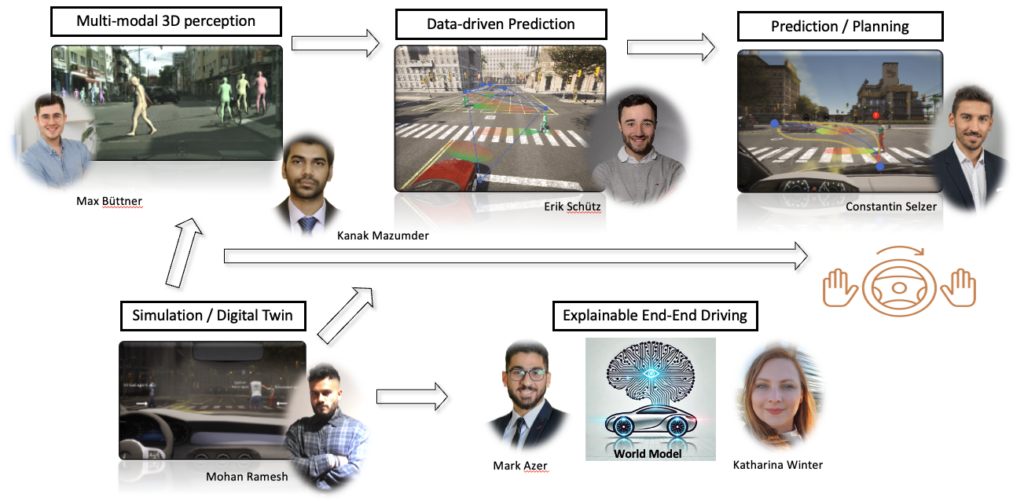
Max Büttner (PhD candidate)
Multi-modal sensor fusion for autonomous driving
with a focus on pose estimation
Max Buettner received his M.Sc. degree in electrical engineering from Munich University of Applied Sciences, Germany, in 2021. Since 2023 he is working towards his PhD, at the Munich University of Applied Sciences, Munich, Germany. His research focus includes machine learning and object detection in the area of autonomous driving, targeting sensor fusion of mainly camera and LiDAR sensors.

Katharina Winter (PhD candidate)
End-to-end trajectory planning with generative models with a focus on explainability
Since February 2024, Katharina Winter is pursuing her Ph.D. at the Munich University of Applied Sciences. Her research topic centers around generative end-to-end trajectory planning for autonomous driving using large language models, with a current focus on abstract representations and explainability. Katharina absolved her M.Sc. in Media Informatics with Business Administration in New Media at the LMU Munich in 2023.

Erik Schütz (PhD candidate)
Data-driven prediction based on fine-grained object attributes
Erik Schuetz received his M.Sc. degree in Robotics, Cognition, Intelligence from the Technical University of Munich in 2023. Since January 2023, Erik has been working towards his Ph.D. as a research assistant at the University of Applied Sciences in Munich. His research focuses on trajectory prediction of traffic participants in the application of autonomous driving in urban areas.

Constantin Selzer (PhD candidate)
Joint prediction and planning for autonomous driving
Constantin Selzer earned his M.Sc. degree in electical engineering at the University of Applied Science in October 2022. His major field of study was autonomous systems. Since February 2023, he is working at his Ph.D. as a research associate at the University of Applied Science. His major field of research is the prediction of traffic participants and trajectory planning for autonomous vehicles in urban areas.

Mohan Ramesh (PhD candidate)
Simulation / Digital Twin models for
cooperative driving scenarios
Mohan Ramesh joined the Intelligent Vehicles lab in April 2023. Using a digital twin and VR/motion capture, his research focuses on achieving a realistic simulation of vulnerable users in urban environments, for modeling autonomous driving systems. Mohan has a B.tech in Engineering and an MSc in Business. Before starting at IVL, he worked as a Data scientist for a FinTech startup in Ireland.

Kanak Mazumder (PhD candidate)
Multi-modal sensor fusion for autonomous driving
with a focus on environment mapping
Kanak Mazumder received his M.Sc. degree in Electrical Systems Engineering from Paderborn University in 2023. Since July 2024, he is working towards his Ph.D. at University of Applied Sciences in Munich. His research focuses on finding effective representation from multi-modal inputs for description and interaction among objects and surrounding environment for autonomous driving in urban areas.

Mark Azer (PhD candidate)
End-to-end trajectory planning with generative models with a focus on conditioning on traffic rules
Mark Azer received his M.Sc. degree in Automation and Robotics at the Technical University of Dortmund in December 2023. His major field of study was Machine learning in autonomous systems. Since July 2024, he is working towards his Ph.D. as a research associate at the Munich University of Applied Science. His major field of research is large language models and their use in end-to-end autonomous systems, with a current focus on multimodality and a conditioning on traffic rules.

Stefan Englmeier (PhD candidate)
End-to-end trajectory planning with Large Language Models
Stefan Englmeier received his M.Sc. degree in Computer Science with a focus on Computer Vision and Machine Learning in 2024 from the University of Applied Sciences Munich. After completing his master’s thesis in the Intelligent Vehicles Lab, he began working toward his Ph.D. at the University of Applied Sciences Munich in 2025. His research focuses on large language models and their application in end-to-end trajectory planning for autonomous driving.

Fabian Flohr (Head of lab)
Professor for Machine Learning
Fabian B. Flohr (born in 1985) received the MSc degree in computer science from the Karlsruhe Institute of Technology, Germany, in 2012. He received the PhD degree in computer science from the University of Amsterdam, The Netherlands, in 2018. From 2012 to 2022, he has been working with Mercedes-Benz Research & Development in Stuttgart, Germany, where he focused on automated driving and worked as technical manager in the topic Vulnerable Road User (VRU) Protection. In his role he defined and coordinated the strategic and technical vision for the VRU topic across multiple international teams. Since 2022, he is a full professor for machine learning at the Munich University for Applied Sciences in Munich, Germany, where he leads the Intelligent Vehicles Lab.
The big picture
Research @ Intelligent Vehicles Lab
Alumni
Asad Munir (PostDoc)
End-to-end systems with generative models
Dharani Deivasihamani (PhD candidate)
Pose estimation